ربات متحرک چهارپای حامل برای نخستین بار در کشور توسط محققان گروه مهندسی کنترل دانشکده برق و کامپیوتر دانشگاه تربیت مدرس طراحی و ساخته شد.
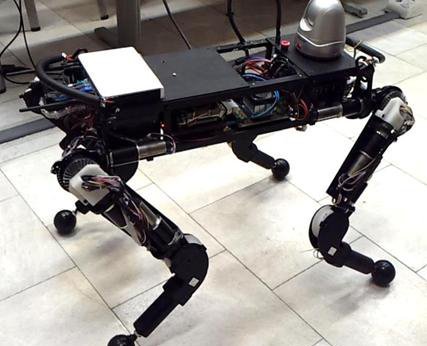
به گزارش پایگاه خبری تحلیلی فناوری و نوآوری، در این پروژه تحقیقاتی یک ربات چهارپا با امکانات پیشرفته با حمایت مالی طرح های صنایع نوین طراحی و ساخته شد که دارای 12 درجه آزادی است و به صورت بی سیم از طریق کاربر قابل کنترل است.
بر روی این ربات یک کامپیوتر تکبردی قرار گرفته است که تنها برنامه کنترلی و مسیریاب حرکتی را اجرا میکند. علاوه بر این فرمانهای لازم را از طریق بیسیم دریافت کرده و اطلاعات مورد نیاز را در اختیار کاربر قرار میدهد.
برنامه مسیریابی این ربات که بالغ بر 1000 خط برنامه است به صورت کامپایل شده و با سرعت بسیار بالا بر روی SBC اجراء میشود.
همچنین یک برنامه کنترلی طراحی و اجرا شده است تا برای مواجهه با تأخیرهای احتمالی برنامه مسیریابی، یک صف از اطلاعات مسیریابی ایجاد و به صورت بی درنگ بین نقاط فرمان برنامه مسیریاب درونیابی شود.
این برنامه فرمانهای لازم را به راهاندازها اعمال کرده و بدین وسیله حرکت پاها را با هم همزمان میکند.
دکتر وحید جوهری مجد، دانشیار دانشکده مهندسی برق دانشگاه و مجری این پروژه درباره این ربات اظهار کرد: بر روی این ربات سه دوربین نصب شده است که ربات را قادر میکند علاوه بر اطراف خود، زیر پاهای خود را ببیند. این دوربینها این امکان را فراهم میآورند تا ربات بتواند بدون حضور کاربر در کنار آن، از دور کنترل شود. از این رو این ربات برای موقعیتهای خطرناک زیست محیطی، حوادث طبیعی و یا امنیتی در آینده کاربرد دارد.
وی در ادامه افزود: با توجه به داشتن تصویر زیر پای ربات امکان تعریف پروژههای هوشمند سازی ربات در آینده برای عبور از مسیرهای ناهموار نیز وجود خواهد داشت. با پردازش تصاویر نیز میتوان اجازه حرکت خودگردان به ربات داد که راه خود را در یک محیط ناشناخته پیدا کند.
به گفته این محقق، ربات طراحی شده در آزمونهای حرکتی اولیه نتایج قابل قبولی را ارائه داده است و هدف این پروژه را که ایجاد دانش فنی در طراحی و ساخت یک ربات چهار پا با 12 درجه آزادی بوده، تأمین کرده است.






